木田鉄工所、パレタイジングを自動化〜ティーチング不要のロボット活用






搬送機メーカーの(株)木田鉄工所(本社/大阪市都島区大東町、木田庄一郎社長)は、ロボットメーカーの(株)ユーシン精機(本社/京都市南区)とロボティクスSIの(株)日立オートメーション(本社/東京都大田区)と共同で、ティーチング作業不要のロボットを活用した「製品箱搬送パレタイジングライン」を開発。箱詰め後の出荷工程の自動化を提案し、順次納入を進めている。
印刷紙器・パッケージの分野では、一般的に用紙搬入から印刷、打ち抜き、さらにサックマシンから出てきた製品を製函し、送り状などのラベルを貼って各パレットに荷積みされて出荷される。これら一連の工程の中で、最も人手による重労働を強いられているのが出荷前のパレタイジングである。これまでこの工程をなかなか自動化できなかった背景には、小ロット多品種化の流れが加速する中で、「箱の種類が多すぎる」という問題がある。その種類は多い会社で数百種類にのぼり、このパレタイジングをロボット化するためには、箱ひとつひとつに対してティーチング作業が必要になる。例え、ティーチングを行ったとしても、箱のサイズが変わるたびに人がその設定を呼び出し、セッティングするという手間を考えると、小ロット多品種化が加速する業界において現実的ではない。
そこで、印刷業界において自動化・省力化システムで多くの実績を誇る搬送機メーカー・木田鉄工所は、自社の搬送技術と日立オートメーションのティーチングレスのロボット制御技術、さらにユーシン精機のXYZ軸型パレタイジングロボットを組み合わせることで、出荷前のパレタイジング自動化ラインの実用化に成功した。
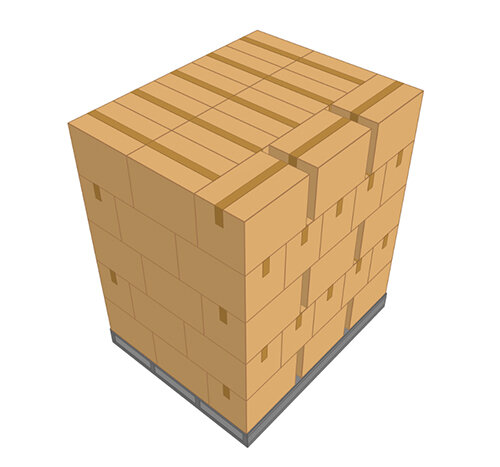
同ラインの具体的な構成としては、まず、箱詰めされた製品に付与されたバーコード情報をコンベア上で読み取り、それに紐付けられたシステム情報に基づいて製品の正誤を照合。正しければパレットナンバーをロボット制御システムに指示する。搬送中のコンベア上で重量計や金属探知機によるチェック運用を経た製品を、今度は3Dビジョンカメラで撮像し、縦・横・高さを測定。このサイズ情報をもとに、指示されたパレットに対してロボット制御側で最も効率的で最適な積み付けを独自のアルゴリズムによるシミュレーションシステムで算出し、それをロボットに指示してパレタイジングが行われる。
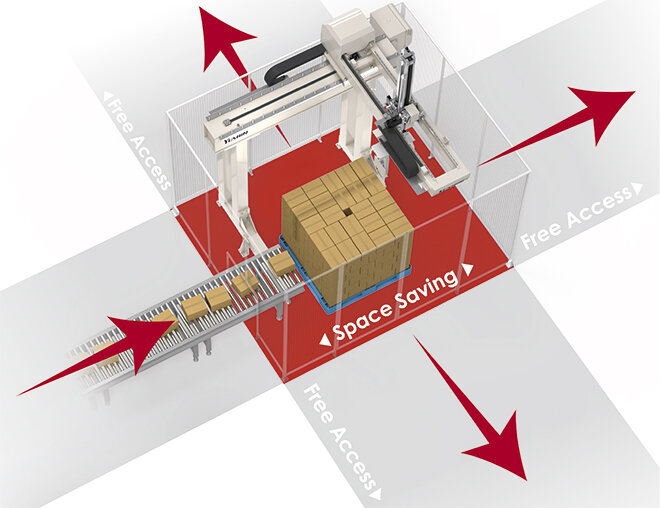
また、ロボットにはXYZ軸型を採用。広いスペースが必要な多関節ロボットやアクセスが1方向のみのガントリー型ロボットに比べて、省スペースで、かつフリーアクセス、自由なレイアウトが可能となっている。
他産業の自動化ノウハウを印刷業界に
木田鉄工所は、IGAS2016で自社開発のブランクス・オートローダーと自動供給(投入)ロボットを組み合わせたシステムを参考出品し、抜き工程から製函ラインの自動化と作業効率向上を提案した。今回の「製品箱搬送パレタイジングライン」開発においても印刷業界における「搬送」を知り尽くした木田鉄工所が、ロボットの世界で高い技術力を持つ2社をコーディネートすることで、これまで難しいとされていた自動化ラインを完成させた。木田鉄工所では、「今後も他産業における自動化のノウハウを印刷業界に持ち込み、新たな効率化の仕組みを提案していきたい」としている。





躍進企業レポート